

Ciao, benvenuta/o su StaticaFacile, questa lezione-esercitazione è dedicata al Cambio coordinate per rotazione sistema di riferimento, in relazione ad un sistema di 6 masse puntiformi.
L’argomento potrebbe essere utile agli studenti di Ingegneria o di Architettura.
Spesso negli studi di geometria delle masse si ha la necessità cambiare sistema di riferimento.
Il nuovo sistema di riferimento può essere traslato rispetto al vecchio sistema, ma può essere anche ruotato oppure traslato e ruotato.
In questa lezione-esercitazione si esamina si esamina il caso del nuovo sistema soltanto ruotato rispetto al vecchio.
Qui di seguito ti anticipo la videolezione. Nei paragrafi successivi troverai i dettagli.
1. Il sistema di riferimento iniziale e l’origine comune
Lo studio della dinamica e della geometria delle masse di un sistema discreto composto da n punti materiali (n masse concentrate) richiede la definizione di un sistema di riferimento cartesiano tridimensionale.
In questo specifico scenario, si considera un sistema iniziale XYZ la cui origine O(0,0,0) non coincide con il centro di massa (baricentro) del sistema.
Di conseguenza, le coordinate delle sei masse puntiformi oggetto di questa esercitazione rappresentano le posizioni effettive dei punti rispetto a questo polo non baricentrico.
Il nuovo sistema di riferimento, composto dagli assi principali di inerzia relativi a quel determinato polo, viene costruito condividendo la medesima origine O.
Non essendo prevista alcuna traslazione geometrica, le distanze e le posizioni rimangono ancorate all’origine stabilita.
2. Definizione degli assi principali rispetto a un polo generico
Per un qualsiasi sistema di punti e rispetto a un polo generico (in questo caso l’origine O), è sempre possibile definire un tensore d’inerzia i cui elementi dipendono sia dalle masse che dalle loro coordinate xyz.
Gli assi principali di inerzia relativi al polo O rappresentano la terna di assi ortogonali rispetto alla quale i prodotti d’inerzia (o momenti misti o momenti centrifughi) del tensore si annullano.
In questo caso il tensore d’inerzia si riduce a una forma puramente diagonale.
Il passaggio dal sistema XYZ al sistema degli assi principali avviene tramite la matrice di rotazione R.
Questa matrice, considerata nota in questo esercizio, è un operatore lineare ortogonale speciale.
Certamente esso descrive l’orientamento relativo delle due terne di assi, permettendo di ruotare gli assi originari fino a farli coincidere con le direzioni principali di inerzia senza spostare l’origine.
3. L’operazione algebrica di rotazione pura
Poiché l’origine dei due sistemi coincide, il cambio di coordinate non richiede la sottrazione delle coordinate del baricentro, configurandosi come una rotazione pura nello spazio.
Dal punto di vista matematico, la trasformazione si esprime attraverso il prodotto diretto tra la matrice di rotazione R e il vettore posizione iniziale Vi di ciascuna massa.
Per ogni massa puntiforme i-esima, il vettore delle nuove coordinate nel sistema degli assi principali, denominato Vi*, è calcolato mediante la relazione lineare: Vi*=R∙Vi
Complessivamente ogni riga della matrice R agisce come un operatore di proiezione, determinando le nuove componenti come combinazione lineare dei valori originari.
I dettagli dell’operazione matriciale sono descritti nel video allegato.
4. Calcolo numerico delle coordinate ruotate
Evidentemente, applicando direttamente la matrice di rotazione R alle coordinate originarie delle sei masse della tabella, si ottengono le posizioni nel nuovo sistema di assi principali associato all’origine O.
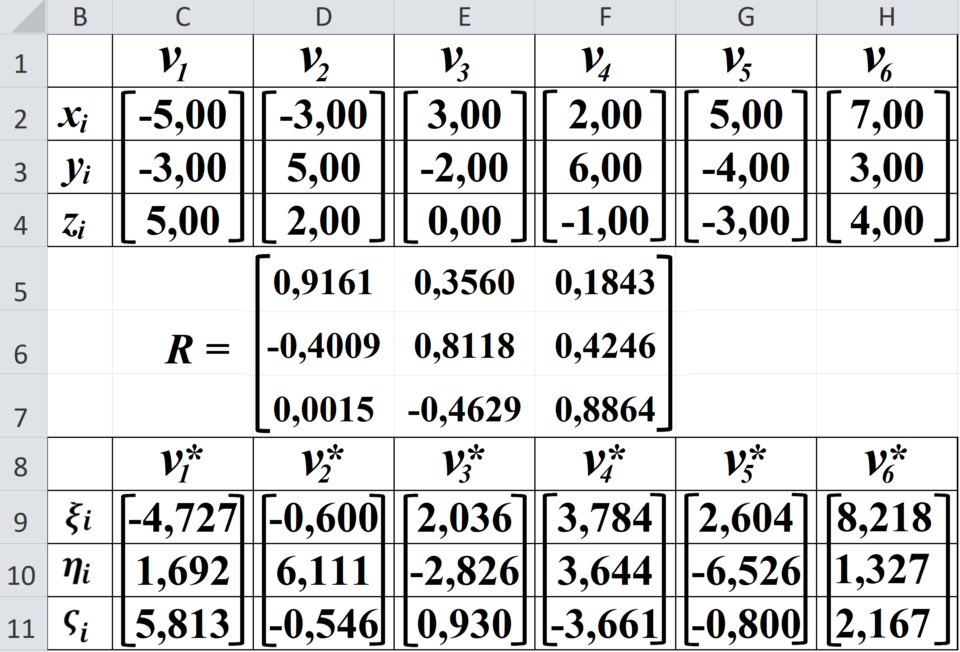
La massa m1 assumerà le seguenti coordinate (componenti del vettore posizione):
V1*=[-4,727;1,692;5,813].
La massa m2 avrà coordinate V2*=[-0,600;6,111;-0,546].
In conclusione, a seguire avremo le coordinate delle altre masse V3*=[2,036;-2,826;0,930], V4*=[3,784;3,644;-3,661], V5*=[2,604;-6,526;-0,800], V6*=[8,218;1,328;2,167].
Questa configurazione finale esprime la geometria del sistema direttamente rispetto ai suoi assi principali di inerzia passanti per l’origine scelta.
I dettagli del calcolo li troverete nel video allegato.
5. Riferimenti lezioni precedenti
Il tensore d’inerzia per un sistema di masse puntiformi con l’uso di Excel
Calcolo degli autovalori del tensore d’inerzia
Calcolo degli autovettori del tensore d’inerzia
Definizione e calcolo della matrice di rotazione
Proprietà delle matrici di rotazione